
“ロボットが人と人との懸け橋になる”をテーマにロボティクスに注力し、業務効率化、顧客満足度向上、顧客単価向上などさまざまな側面でカスタマーサクセスを創出し続けるソフトバンク。
ソフトバンクはデジタル庁から受託した「デジタルツイン構築に関する調査研究」の一環として、空間IDを活用したデータ共有に関する研究を進め、さまざまな目的・用途に空間IDを試験的に利用し、その有用性や問題点を探ることを目的に実証実験を実施してきた。
また、これらの知見を生かして歩行空間DX研究会の歩行空間の「3次元地図WG」および「歩行空間の移動円滑化データWG」に参加し、ロボットと空間情報に関する事業について新たな展開を模索し続けている。
ソフトバンクは2023年1月に都内のオフィスビル「日比谷パークフロント」にて屋内型自律走行ロボット「Cuboid(キューボイド)」を活用したデモを実施。同年9月には東京都の先端テクノロジーショーケーシング事業「Tokyo Robot Collection」に参加、11月には戸田建設がCuboidをベースにした「ビル内移動環境計測・通知システム」のプロトタイプを開発するなど、Cuboid(キューボイド)を活用したサービス実用化に向けて実証実験が進められている。
世界をリードするロボットインテグレーターとして台頭しつつあるソフトバンクが、今歩行空間ナビ・プロジェクトの活動に期待するものとは。ソフトバンク株式会社テクノロジーユニット Chief Scientist室 ROS-SI推進課の古谷智彦さんと渡辺博文さんにお話を伺った。
ロボットの自律走行に求められるインフラとは

――御社が自動走行ロボットの事業を始められたきっかけ、事業の目標・コンセプトなどについて教えてください。
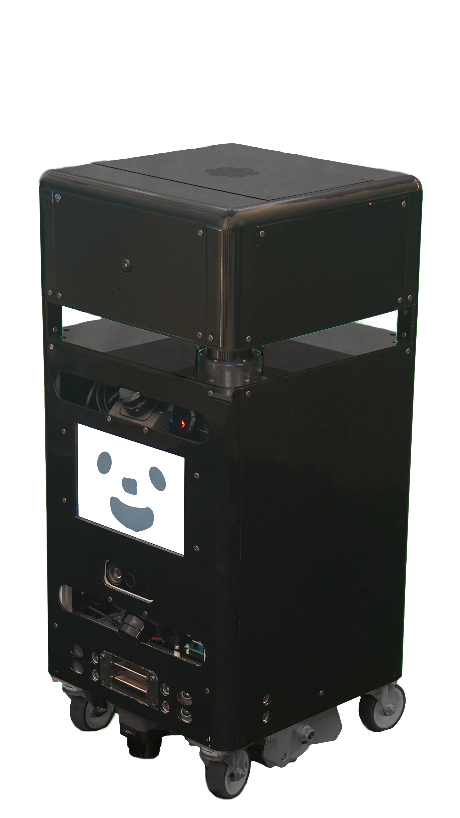
古谷:約10年前からソフトバンクではグループを挙げてロボットに力を入れはじめ、ソフトバンクロボティクスのPepper※1をはじめとしてロボットに関するさまざまな研究開発を行ってきましたが、われわれもその一環としてCuboidというロボットを開発し、自動走行・自律走行に関する知見を蓄積してきました。
その過程でロボットが異なる階を移動できないなどさまざまな制限がある中で、より広い範囲を移動するためにエレベータや屋外の信号といったインフラと連携しながらロボットを動かすための研究を行ってきました。
――自動走行ロボットの貴社のお取組みについて具体的に教えてください。
古谷:2020年には総務省が推進するIoTの安心・安全かつ適正な利用環境の構築に関する実証事業「自律走行ロボットエレベータ連携実証事業」の一環としてロボットとエレベータとの連携技術を実証しましたが、同様の技術がこの竹芝本社ビルでも全面的に導入されています。この本社ビルでは他にもロボットが人と共存してスムーズに運行することを可能にする経済産業省のロボットフレンドリー(ロボフレ)環境構築に関する共同研究を行いました。
さらにこれはデジタル庁の助成を受けた実証ですが、空間を一意に特定するための規格、空間IDというものがあります。例えばこの机の上の空間を緯度・経度・高さを使って一意に定める。この四角い空間にアドレスを与えるようなものですね。実証の内容としてはそうした技術を活用し、ロボットと人向けのナビゲーションアプリで同じIDを使って情報共有を行うというものでした。
屋外の走行については2019年からつくばチャレンジ※2という、ロボットで公道を走行するチャレンジに参加を続けており、2021年~2022年には経産省・NEDOの支援を受けて、ロボットが信号と連携して安全に竹芝の横断歩道を走行する実証も行いました。
――私も先ほど渡りましたが、かなり長い横断歩道ですよね。
古谷:そうですね。信号も本当に歩行者が渡れるぴったりの時間しか青になっていないんです。なのでロボットが不用意に侵入してしまうと途中で信号が変わってしまうのですが、ロボットが信号と連携することで青に変わった瞬間に走り出せば安全に渡れるだろうと考え、そのための実証実験を行いました。
これらの知見を活用し、2023年12月には歩行空間DX研究会の「3次元点群データを自動配送ロボットの走行に活用するための実証」についても協力させていただきました。
歩行空間ネットワークデータの「共通領域」と「競争領域」

――ロボットの自動走行に必要なデータについて教えてください。
古谷:われわれのロボットが屋外を走行する際には、LiDAR※3というセンサを用い、現在の周囲の状況とあらかじめ作成しておいた3次元点群地図とを比較しながら自己位置を推定する、スキャンマッチングという手法を用いています。このためには3次元点群地図がないとわかりませんので、これが重要なデータのひとつになります。
もうひとつは、地図の上でどこを走って、どこに信号があって、信号待ちの時にはどこに停止すべきかといった経路に関する情報の入ったベクターマップ。つまり自分の位置を知るための地図とその上でどこを走るべきかという経路を示す2つのデータが必要になります。
――ロボット事業者間でのデータの共通利用の可能性について教えてください。
古谷:精度の良い3次元点群地図を自分で作成しようと思うと高性能で高価なLiDARセンサ、さらにそのデータを綺麗に加工するための多大な手間が必要になります。しかし点群地図がすでに用意されている場合、川崎市でも用いたような安価なLiDARセンサでも必要十分な自己位置精度が得られますので、こういったものが共通利用できると導入コストの低減が期待できます。
また、走行経路についても「この歩道では道路側を走ってほしい」「信号待ちは延長ボタンのない側でしてほしい」など自治体・住民の皆様からさまざまな要望が出ることが考えられますが、これらを各事業者が個々に聞き取りを行うことは非効率です。ですので、この経路の情報に関してもロボットの自動走行を手掛ける事業者間で共通利用できれば、大きなメリットがあると思います。
――想定されるデータ提供のされ方、提供元などについて教えてください。
古谷:われわれはロボット、あるいはロボットを管理するシステムから利用したいと思っていますので、ある程度システム化された取得が可能になると非常にありがたいです。3次元点群地図については、ロボットやロボットを管理するシステムから、緯度経度やそれをベースにした空間ID、あるいは歩行空間ネットワークのノードIDといったキーを元に、APIを通じて自動的に取得できるようなシステムで提供される形が望ましいです。ロボットが現在の地図の端の地図切り替えポイントに到達したら、APIを通じて次の地図を読み込んで再度走り出す、といったイメージですね。
データの提供元については、道路管理と一体で整備される形を想定しますので、道路を管理する国あるいは自治体をイメージしますが、技術的な面もありますので、民間の地図サービス事業者が委託を受けて提供する形もあるのかもしれません。
――ロボットを走らせるとなると、事業者ごとに特徴やノウハウがありますよね。そういう意味で当然、共通領域と競争領域とがあると考えておりますが、走行に必要なデータのうち、共通で提供されるのに適している領域はどのあたりでしょうか?
古谷:3次元点群地図と走行経路、あとは走行経路に含まれるかもしれませんが各施設・住宅での受け取り希望場所などは共有されると配達事業者・受け取り手双方にメリットがあるように思います。そこから先はたとえば大きなものや冷凍物が運べるなどのロボットの性能の部分、あとはアプリでの通知や日時調整といった顧客へのリーチ、人では提供しにくい夜間早朝の配送などの付加サービスが競争領域になっていくのではないでしょうか。
――たとえば時間帯や天候によってデータを変えなければいけないとか、そういう状況に合わせたフレキシブルな対応の部分も競争領域と言えそうですね。
古谷:たとえば建物によってはこの時間はゲートが開いていないから裏手に回る必要があるとか、そういう対応のためのデータは共通の領域ですよね。施設管理者と事業者の間に契約があって、この配送事業者はより中まで入れるというような部分で競争していただけるのはいいかなと思います。
――自動走行ロボットの提供・普及によって、将来的にどのような世界の実現を目指されているかお聞かせください。
古谷:われわれは自動走行ロボットが活用できる場を増やすべく、エレベータに乗せたり、信号と連携させて渡れるようにしたりとさまざまな実証を行ってきましたが、ロボットフレンドリーな環境を作ることは、人にとってもバリアフリーな環境を作ることにつながっていると昨今感じるところです。将来的には人もロボットも同じように技術の支援を受けてより容易に、自由に移動できる世界を目指していきたいです。
ほこナビ・プロジェクトへの期待

――ソフトバンクさんには歩行空間ナビ・プロジェクトに関して「歩行空間の3次元地図WG」および「歩行空間の移動円滑化データWG」に参加していただくとともに、先におっしゃられたように川崎市における実証実験にもご協力いただいていますね。WGでは今施設やトイレのデータなどの取りまとめを進めていますが、本プロジェクトで扱うデータを貴社のサービスで利用できそうなシーンがあれば教えてください。
古谷:当然ロボットや空間情報という事業に関しては直接的に利用できるものと思っております。施設データに関しても、段差といった属性やエレベータなど、そういった情報もロボットの運行に関して非常に参考になるものだと考えています。あとはわれわれの担当外ではありますが、LINE、YAHOOといったグループ事業サービスでの活用もありうるように思いますね。
――本プロジェクトでどのようなデータが扱われる、オープンデータとして公開されることを期待されますか?
古谷:われわれも川崎市における実証は非常に有意義なものだったと感じています。プロジェクトの中で整備された点群地図データは、研究対象としての価値も高い、貴重なものだと思いますので公開を期待しています。点群、歩行空間ネットワークデータともに、ロボットが走行しやすい場所、たとえばつくばチャレンジの開催されるつくば市役所付近などのデータが整備されて公開されると、ロボット事業者側の関心も高まるように思います。
また、入れ物となる層のデータプラットフォームとそこに入れるための技術、具体的にはデータの作成方法やそのためのツールも、オープンソース化可能なものは公開されていくとありがたいです。

――最後になりますが、歩行空間ナビ・プロジェクトについて今後期待されていることがあればお聞かせください。
古谷:繰り返しになりますが、ロボットの移動経路を考える際には、屋外の歩行空間ネットワークデータ、施設内の段差やエレベータなどのデータ共に大変参考になります。ただ利用させていただくだけでなく、今までデータの整備が進んでいなかった施設においても、たとえば施設管理のための掃除ロボットや搬送ロボットなどの導入が契機となってエレベータや段差などのデータの整備が進むこともあり得ると思っています。そのように人とロボット双方が移動しやすい環境を作っていけるよう、相乗効果を出していければと期待しています。
渡辺:プロジェクトへの今後の期待ということで言えば、データの取得に関して民間の地図事業者さんに委託して取るのもいいとは思いますが、民間の方がスマートフォンで撮ってアップするような仕組みも今検討されていますよね。どんなインセンティブで誰がどのように上げていくのかはまだわかりませんが、今後議論が進んで誰でもデータを上げることができ、それを整備するための仕組みができれば本当に良いものになるのではないかと思っています。
――本日はお忙しい中、ありがとうございました。
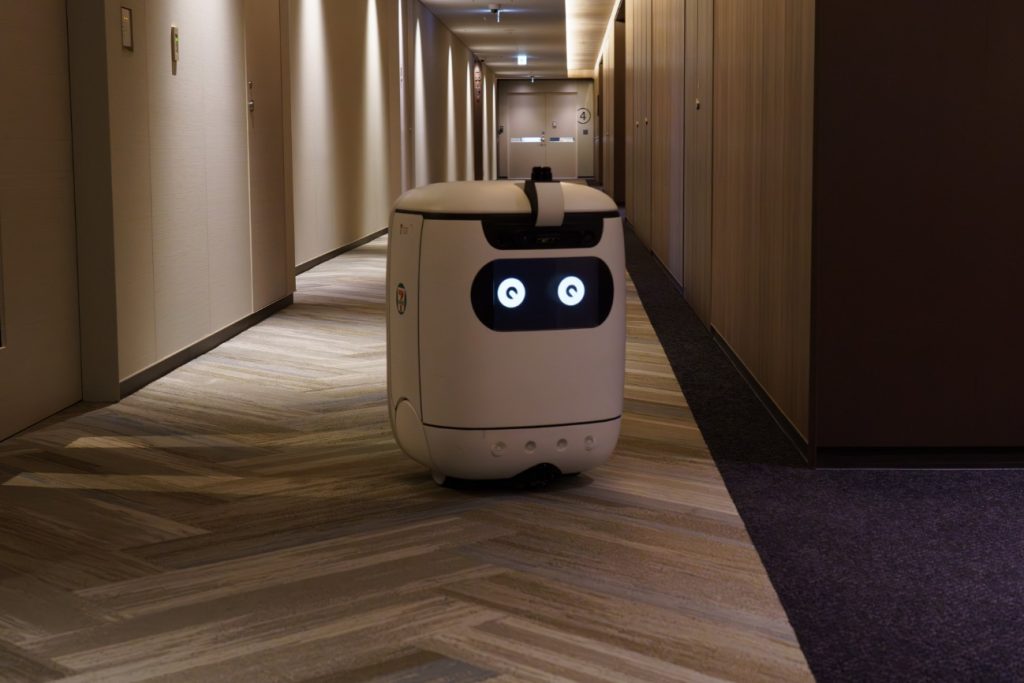
インタビュー後、自律走行型配送ロボット「RICE(ライス)」を使用してセブン-イレブンの商品を配送するサービスを体験させていただいた。これはより便利なサービスの実現に向けて、新たな配送方法の可能性を検討することを目的に、「7NOW」で注文した商品を、RICEで東京ポートシティ竹芝オフィスタワー内のセブン-イレブン店舗から他のフロアを含めた指定の場所へ配送するというもの。
セブン‐イレブン店舗のスタッフがRICEに商品を載せ、配送先を選択すると、「RICE」がエレベータに乗って指定されたフロアへ移動。指定された配送先に到着すると、注文者のスマートフォンに暗証番号が通知され、RICEに暗証番号を入力することで商品を取り出すことができる。こうしたラストワンマイルにおける新たな取り組みの推進においても、今後歩行空間ナビ・プロジェクトの取り組みが貢献することが期待されている。
※1 2014年6月に誕生した「感情エンジン」と「クラウドAI」を搭載した感情認識ヒューマノイドロボット。 スマートフォン同様、さまざまなアプリケーション(ロボアプリ)をインストールすることで機能を増やしたり、自分好みに変えたりすることが可能。
※2 2007年から毎年実施している、移動ロボットが遊歩道等の市街地を自律走行する技術チャレンジ。人々が普段使っているあるがままの実環境(リアルワールド)における自律走行技術の進歩を目的として、公開実験を行っている。
※3 「Light Detection And Ranging」の略。レーザー光を照射して、その反射光の情報をもとに対象物までの距離や対象物の形などを計測する技術。