

2024年11月18日~19日の2日間、2023年度に国土交通省が開発した『3次元地図整備システム(プロトタイプ)』を活用した歩行空間の3次元地図整備の運用実証が、静岡県沼津市で実施されました。
人やロボットの移動支援サービスの高度化に向けて、国土交通省では、2023年度から「歩行空間ナビゲーションデータプラットフォーム(通称:ほこナビDP)」の整備を推進しています。ほこナビDPは、歩行空間ネットワークデータ、施設データ、3次元地図データを整備するシステムで構成されています。
今回はそのうち、2023年度に開発した、多様な移動支援サービスで利用可能な3次元地図データのオープンデータ化を実現する『3次元地図整備システム』のプロトタイプを活用し、自治体職員の協力を得ながら、実運用に向けたマニュアル作成や課題整理のための実証実験が行われました。
なお、同システムで整備する3次元地図データは、 車載 MMS(※1)や手持ち型レーザースキャナ、 LiDAR(※2)付きスマートフォンなどで取得した3次元点群データ(※3)をもとに作成するものです。必要に応じて、写り込んだ人や車両といった移動物体のフィルタリング(除去)や、複数の点群データの統合処理なども行います。
※1 Mobile Mapping System、レーザースキャナやカメラなどを搭載した車両や台車などで移動しながら周囲を3次元測量するシステム
※2 Light Detection And Ranging、レーザー光照射により反射光を検出することで、対象物までの距離や形状を測定するセンサー
※3 座標値と物体の色情報をもつ点状のデータの集合。コンピュータグラフィックの3次元空間にその点を表示することで、現実の物や空間をリアルに表現することができる。
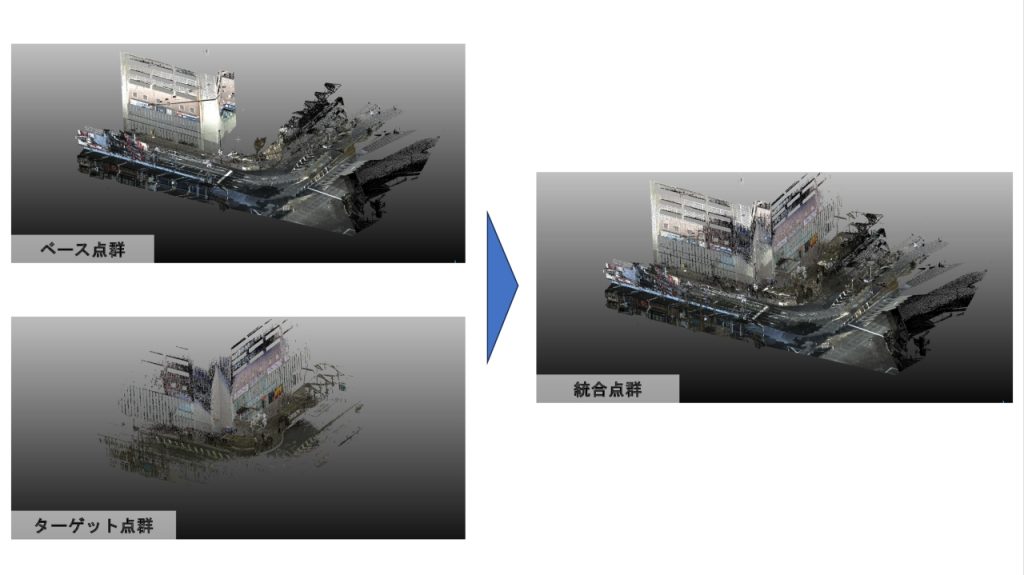
3次元地図データを整備する際には、高精度、かつ広域のデータ取得が可能な車載 MMSなどで取得した車道部の点群データをベースに、 距離や障害物などの問題で計測できずにいた歩道部の欠損箇所を、他センサーで計測した点群データを用いて補完していく方法が効率的だと考えられています。
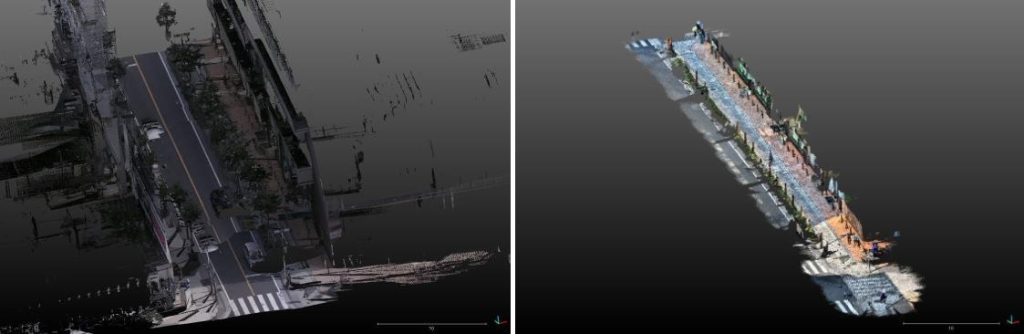

そうした考えにのっとり、今回の実証では、自治体が保有する車載MMSで計測した点群データをベース点群として活用し、補完のための点群データ(以下、ターゲット点群)を新たに取得、統合する形を想定していました。
全国的に3次元点群データを整備している自治体は増えていますが、その中でも静岡県は、全国に先駆けて県下全域の3次元点群データを取得・蓄積し、オープンデータ化を推進。2019年度からは「VIRTUAL SHIZUOKA(バーチャル静岡)構想」を立ち上げ、3次元点群データが、まちのデジタルツイン時代における新たな社会インフラとして県民や企業などの多様な主体に活用されることを目指していることなどから、今回協力を仰ぐことになりました。

静岡県だけでなく静岡市、沼津市、三島市の職員が参加した実証は、2日間にわたり実施されました。1日目は室内での講習から開始。点群データの仕組みや、データ取得からデータ公開管理までの一連のフローを確認した後、フィールドでの計測前に、計測機器の操作に慣れるための時間が設けられました。

計測に使用されたのは、ハンディLiDARのBLK2GO(Leica Geosystems製)と、iPhone /iPad Pro(Apple製)の2種類です。
ハンディLiDARは、LiDARセンサー、カメラ、物の姿勢や傾きを測るIMU( Inertial Mesurement Unit)センサーを組み合わせた、LiDAR SLAM(Simultaneous Localization and Mapping)という自己位置推定と周辺地図を同時に作成する技術を用いて点群データを生成できます。
一方の iPhone/ iPad Pro シリーズは 、LiDARセンサーから得た距離情報と、カメラとIMUセンサーで計算した位置姿勢(軌跡)で点群データを生成できます。価格が数百万円にのぼるハンディLiDARに比べて安価で手に入るものですが、ハンディLiDARの距離情報取得範囲が25mであるのに対し、iPhone/ iPad Proは5m 程度と言われており、計測時間により累積誤差が増加するため広域のデータ取得には向かないなど、それぞれに特徴があります。
参加者はそうした特徴を踏まえつつ、「ハンディLiDARは、計測範囲内を一周するような経路でデータ取得すると、始点と終点のデータの重なりを利用して位置のズレを改善できる(ループクロージングと呼ばれる手法)」、「iPhoneは被写体に対して平行になるような角度で持つ」など、品質の良い点群データを取得するコツや操作手順を把握していきました。
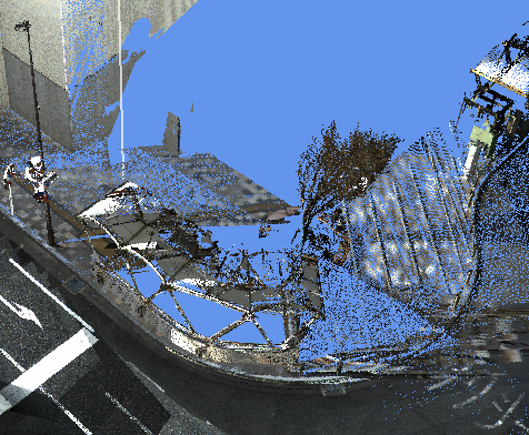
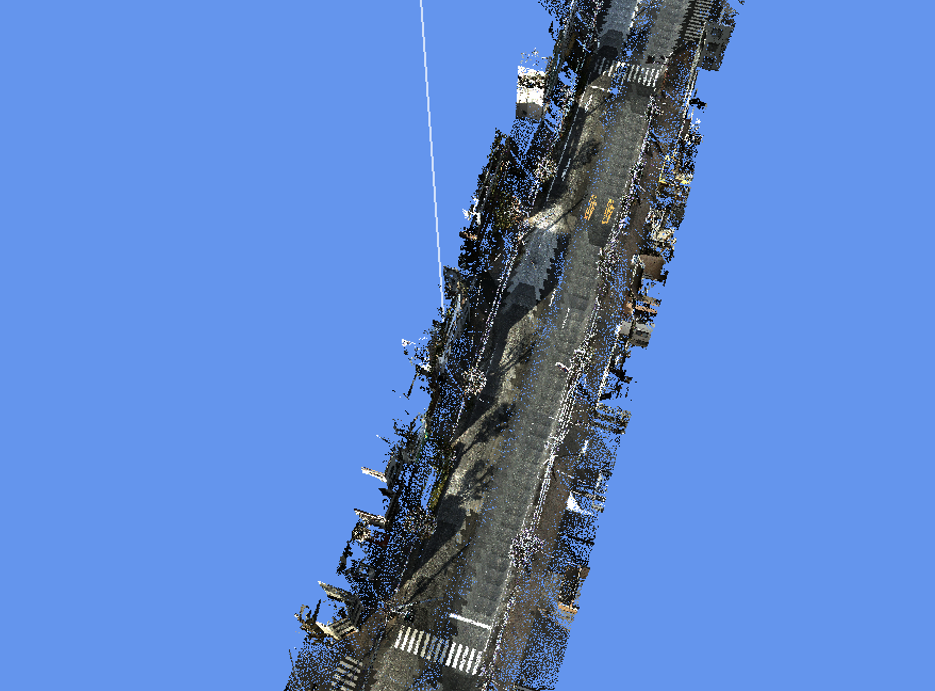
計測のフィールドとなったのは、沼津駅前のロータリー付近と、駅から沼津港へ向かう県道52号線付近の2エリアです。参加者がそれぞれ、ハンディLiDARとiPhone/ iPad Proを利用してデータ取得を行いました。


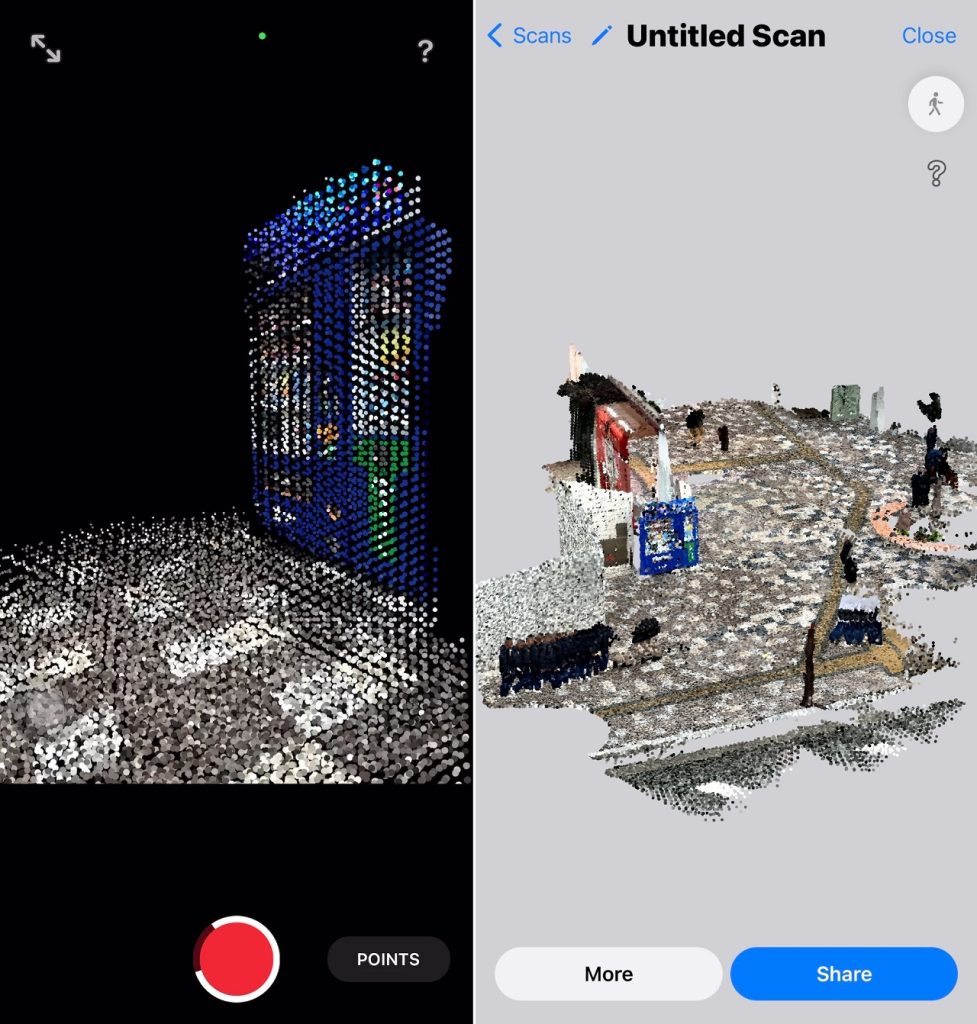
今回、iPhone/iPad Proでは、点群データを生成できる無料のiOS向けアプリ「3d Scanner App™」を使用しました。取得したデータを即座に3Dオブジェクトとして表示できるため、参加者は自分の成果を興味深そうに確認しつつ、操作を繰り返すことで少しずつ感覚をつかんでいったようです。
一通りのデータ取得が終わったところで室内に戻り、ヒアリングを行って1日目の実証は終了。2日目は、1日目で取得したデータを用いて、『3次元地図整備システム』で座標系変換、ノイズフィルタリング、統合処理などの加工を行い、公開データとしてアップロードするまでの作業が行われました。


点群データは多様な座標系(地球上の特定の位置を、緯度経度・XY座標などの座標値を使って示す際の基準)を保有しており、同システムは基本的に、日本の公共測量で利用されている平面直角座標と呼ばれる座標系で変換済みのデータを、クラウド上にアップロードしてもらうことを前提にしています。ただし、スマートフォン取得のデータのみ、緯度経度座標でのアップロードが可能となっており、1日目に取得したデータも同様の座標で出力していたため、その変換処理を実施しました。
自動配送ロボットを走らせるケースなど、点群データの利用用途によっては、写りこんだ人や車両を削除する必要があります。続けて、同システムのフィルタリングツールを用いたノイズフィルタリングの作業に移りました。
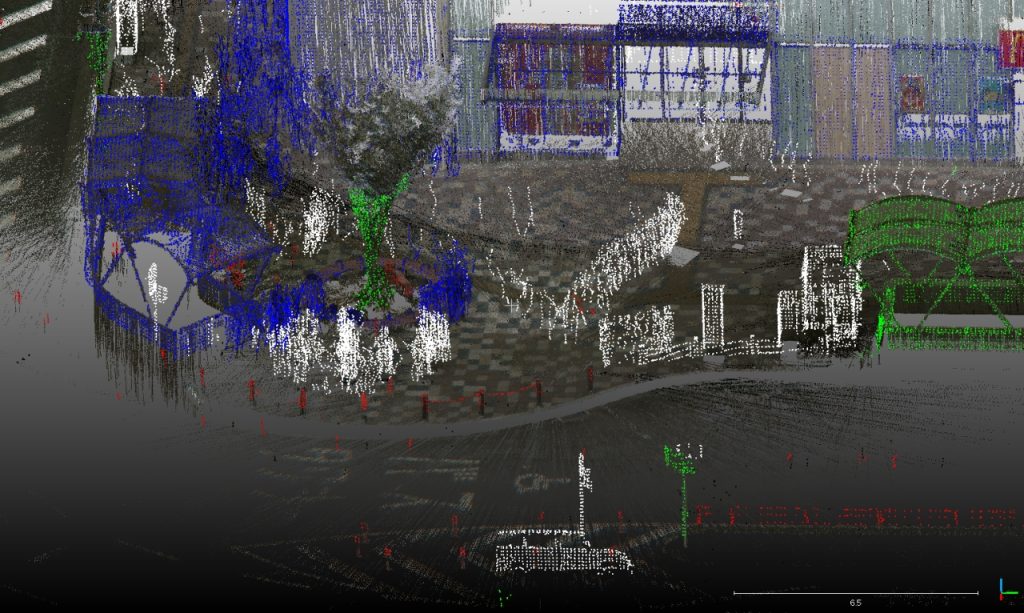
なお、令和5年度の実証実験の結果では、自動フィルタリングによる人や車両のフィルタリング率は8割程度となっており、過剰除去や除去漏れが発生する可能性もあります。そのため、フィルタリングの厳密な精度が求められるような場面では、同ツールによる自動フィルタリング適用後の点群データに対し、 オープンソースの「CloudCompare」という点群処理ソフトを用いて、処理結果の確認、及び編集を行うことも検討されています。
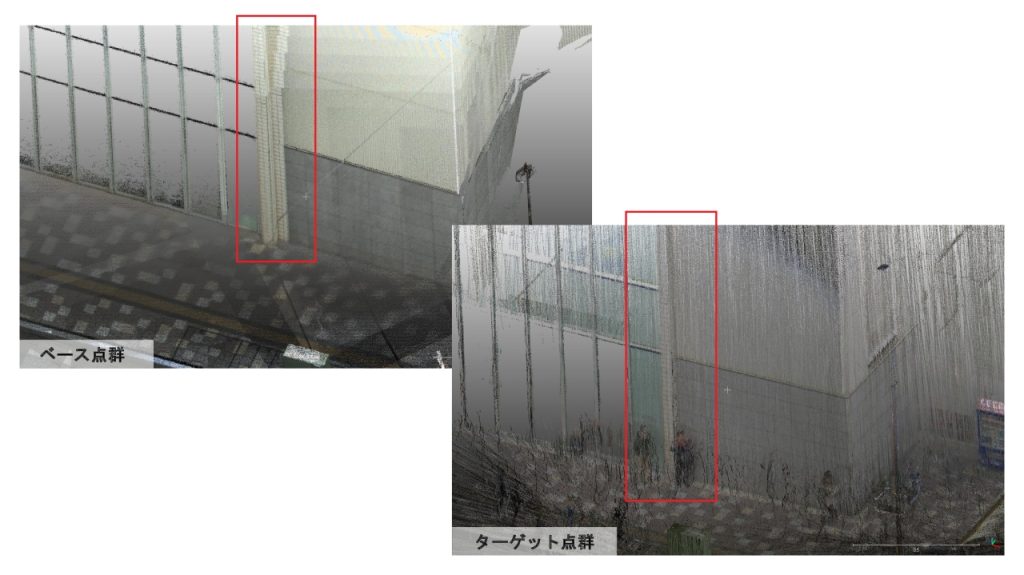
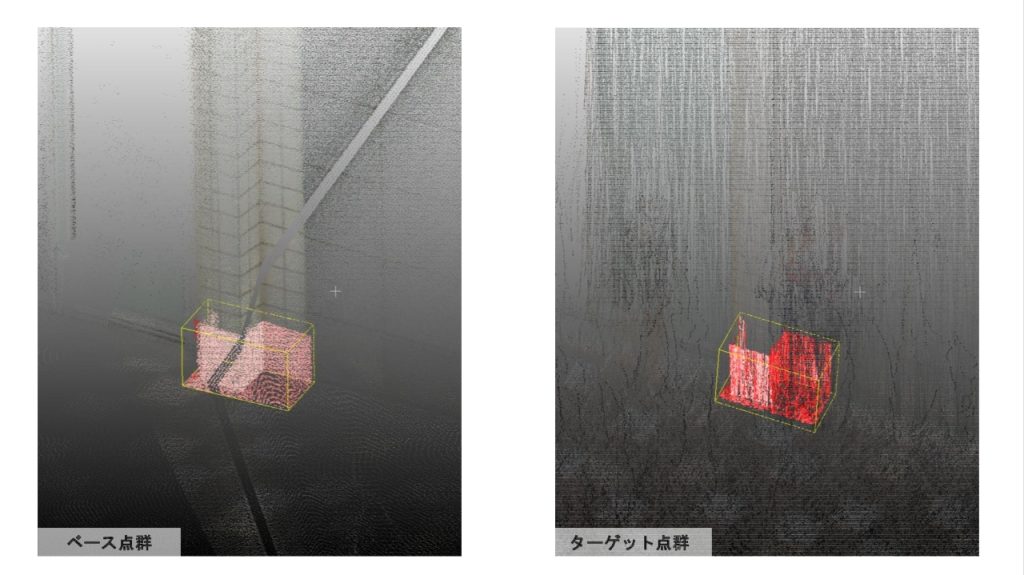
この日の作業でもっとも難易度が高かったのは、本実証のメインともいえる、ベース点群にターゲット点群を合わせる統合処理でした。異なる点群をズレなく統合するためには、統合する点群間で共通する事物(柱や標識など)をサンプルとして切り出して(指定して)、位置合わせをする必要があります。
「点群の精度が高い場所を切り出す」ことはもちろん、「複数の平面の場所を切り出す」「離れた場所を2カ所以上(理想は3カ所以上)切り出す」など優先すべき条件があり、適切なサンプルを見極める作業は初心者には難しく、また、一部の参加者はCloudCompare で3Dオブジェクトを扱った経験がなかったため、レクチャーも一つひとつ時間をかけたものになりました。
最後に、3次元地図整備システムのうち、計測から公開までのデータの受け渡しと、データの公開管理を行うクラウド上での作業に当たりました。点群データの閲覧やダウンロードを行う公開サイトや、点群データの属性編集やデータ削除を行う管理サイトなどで一通りの機能を確認した後、ヒアリングの時間を設け、2日間にわたる実証が終了しました。

計測についてのヒアリングでは、計測自体は容易、あるいは、ある程度トレーニングをすれば実務として着手していけそうだという意見が多かった一方で、機材購入のハードルの高さが課題として挙げられました。
「いま、点群データは発展途上にあるもの。点群データでいろいろなことができるとは理解されているが、予算を査定する部門から、市の財政事情に対してどの程度の効果があるのかと聞かれると、なかなか説明ができない。ただ点群データが取れるというだけではなく、それ以外の使い方も考えつつ要求していかなければいけない」
「道路の補修などで点群データの更新が必要になった場合、補修を担当した業者に計測を任せるとして、PCやiPadなどの機材をどう調達するのか。そのハードルを超えるのが難しい印象がある」
といった声が聞かれました。
また、データ加工や管理に関しても、「必要なのは学習と慣れで、ガイドラインがあれば誰でも対応できそうだ」と評価しつつ、「自動化にはどうしても限界があるという実感がある。将来基盤となるインフラを作るうえで及第点のデータを整備するには、相当量の手作業が必要なのではないか」という懸念を抱いた参加者もいました。「作業量とそれに割かれる時間を考えれば、現状では自治体職員ではなくプロに任せたいというのが率直な感想。喫緊に自治体に対応を迫るのではなく、10年20年先を見据えるくらいのプロジェクトにするのがちょうどいいのでは」とのことでした。

国土交通省では、誰もが自律的に安心して移動できる包摂社会の実現に向けて、歩行空間を利用する人・ロボットの様々なニーズに対応する各種データのオープンデータ化を推進しています。今回扱ったようなオープンデータは、現在のところバリアフリーデータの整備や、自動配送ロボットが移動する経路を探索するためのベースマップなどへの利活用が想定されていますが、実証でのヒアリングを踏まえ、自治体職員のモチベーションになるような新しい分野での利活用についても検討していきたいと話しました。