

2023年12月18日(月)~20日(水)の3日間、JR川崎駅周辺において、歩行空間における移動支援サービスの普及・高度化に向け、多様な3次元点群データを自動配送ロボット等の走行に活用するための実証を行いました。
国土交通省では、歩行空間における段差、勾配などのバリア情報やバリアフリー対応施設の情報を「歩行空間ネットワークデータ」として整備し、オープンデータ化する取組を推進。バリアを避けた最適なルートのナビゲーション等のサービスの普及・高度化を通して、すべての人・ロボットがストレスなく移動できるユニバーサル社会の実現に取り組んでいます。
今回の実証は、自動配送ロボット等の走行に必要な「3次元点群データ」の要件整理を目的としたものです。
3次元点群データとは、3次元レーザースキャナー等で地形や構造物の形状、位置、高さなどを計測して得られた、3次元座標をもつ「点」の集合体のこと。
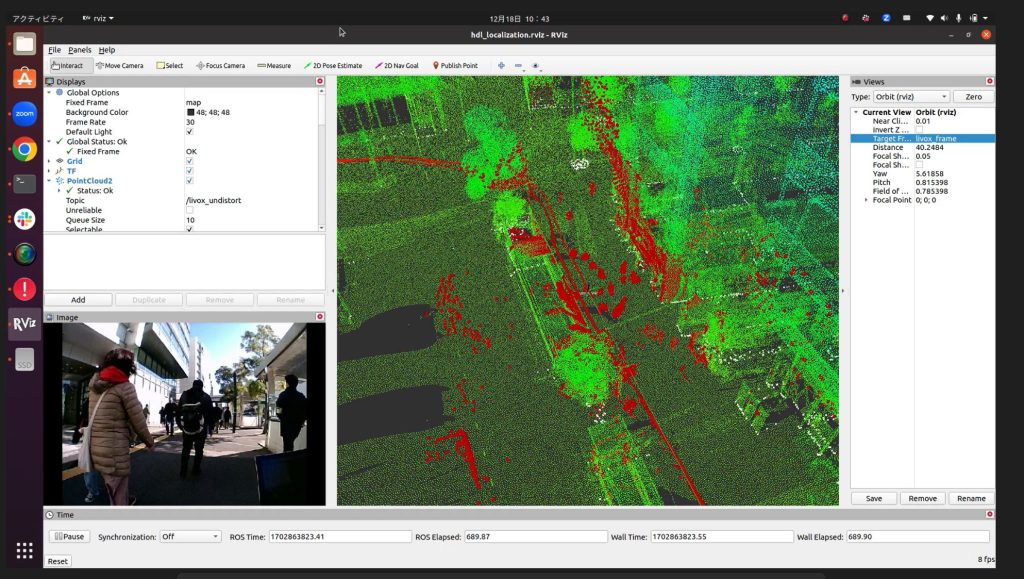
自動配送ロボット等が走行する際、自己位置を推定するためには事前に取得したベースマップとなる3次元点群データと、自機に搭載したセンサーでリアルタイムに取得する3次元点群データを照らし合わせる必要があります。
実証では、事前に取得したJR川崎駅周辺の多様な3次元点群データ(※)と、自動配送ロボットと同様の自己位置推定処理技術を搭載した検証機体を用意。どのような3次元点群データであれば自己位置推定処理を正常に行えるのか、また経路設定(プランニング)に活用できるのか、その可能性を探るべく複数の検証ケースが設定されました。
(※)車載MMS(モービルマッピングシステム)、台車MMS、バックパック型MMS、ハンディ型MMS、スマートフォン搭載のセンサー等で計測したデータを加工(統合・フィルタリング)したもの。




ベースマップとなる3次元点群データは、以下の検証観点から11種類のケースが組まれました。
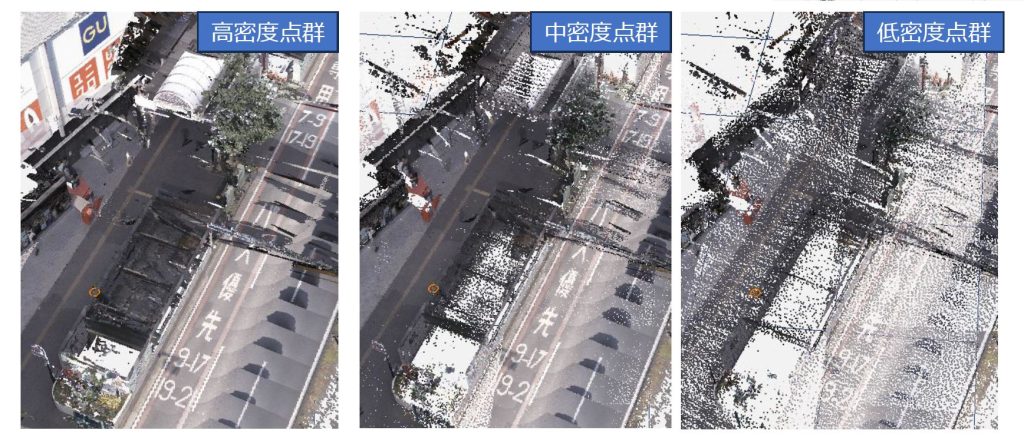
①点群密度
⇒点群密度と共に歩行空間上の設備(地物)の再現性を確認し、自己位置推定処理および経路設定に必要な点群密度を「低密度」「中密度」「高密度」と段階分けして確認。(100点/㎡程度の「低密度」から、事前計測で取得した3 次元点群データの密度である数千点/㎡~1 万点超/㎡をそのまま利用した「高密度」まで)
②ベースマップの整備範囲
⇒ベースマップとなる3 次元点群データが、検証機体の位置からどの程度のエリアまで整備されていればよいかを「狭範囲」「中範囲」「広範囲」と段階分けして確認。(検証機体が走行する歩道周辺の点群のみ整備した「狭範囲」から、反対車線の歩道面や路面付近のビルの壁まで点群を整備した「広範囲」まで)

③3次元点群データの統合精度
⇒ベースマップとして利用する3次元点群データは複数の計測データを統合して整備しているため、統合により発生する点群間の誤差がどの程度許容できるかを「低精度」「中精度」「高精度」と段階分けして確認。(プロトタイプツール[統合処理システム]で補正しただけの「低精度」から、すべて手作業で細かい部分まで補正した「高精度」まで)

実証の例として、点群密度が「低密度」、ベースマップの整備範囲が「狭範囲」、3次元点群データの統合精度が「高精度」の組み合わせで走行したところ、スタートして間もなく自己位置の推定が困難となりました。今後、詳細な分析が必要ですが、おそらく、ベースマップの整備範囲が不足したためだと考えられます。

続けて行われた実証では、先ほどの組み合わせからベースマップの整備範囲のみ「中範囲」(歩道および検証機体が走行する歩道の隣の車線の3次元点群データまでを整備したもの)に変更したところ、目標であったJR川崎駅前から川崎市役所まで自己位置推定を継続し、走行経路を完走することができました。
また、別のケースでは、点群密度が「高密度」では、ベースマップのデータサイズが膨大すぎて、自己位置推定を行うためのPCにベースマップを読み込ませることすらできなかったなど、さまざまな結果が得られました。
完走できたケースでも、走行中は常に自己位置推定を行い続けて走行することができたのか、あるいは、断続的に自己位置推定が不能となり、処理不能と復旧を繰り返すことで完走することができたのか、また高密度の3次元点群データと比べて、中密度や低密度の場合に自己位置推定がどれだけ破綻しやすいかも、今回の結果を詳細に分析して判別していくことができます。

こうして、自動配送ロボット等の走行に必要な3次元点群データの要件整理を行い、検討を進めることで、自動配送ロボット等の開発事業者それぞれが取得した3次元点群データや道路管理者が取得した3次元点群データの2次利用が可能となると考えられます。そして、このようなデータがオープンデータ化されれば、歩行空間ネットワークデータの整備・更新への活用や自動配送ロボット、自動運転車椅子等の開発事業者各社のデータの事前取得に係る負担軽減や新規事業エリア参入のハードルが下がるとともに、地域社会の魅力向上につながっていくことが期待されます。